










面向量产的行泊一体技术架构与产品矩阵
来源:盖世汽车
2023年5月9日—10日,在由捷途汽车主办,盖世汽车承办的2023捷途汽车电子架构与智能驾驶论坛上,Nullmax纽劢创始人/COO宋新雨表示,Nullmax致力于以技术创新推动智能驾驶实现更大规模的应用普及,打造了全球领先的技术架构与产品矩阵,赋能行泊一体方案加速落地。
Nullmax全自主研发的高级别自动驾驶辅助方案涵盖车端、云端,包括完整上层应用MaxStack、中间件MaxOS以及云端数据系统MaxCloud。基于领先的自动驾驶全栈技术,Nullmax可提供丰富的量产化应用,现已推出 MaxDrive 行泊一体和 MaxVision 视觉感知算法等解决方案,产品矩阵全面覆盖高、中、低算力要求。
其中,MaxDrive作为目前市面上极少有的真正融合的行泊一体4.0形态方案,得益于Nullmax的BEV-AI技术架构,兼顾技术性能和部署成本的双重需求,在前装量产领域获得了广泛认可。携手多家传统车厂、造车新势力和Tier1合作伙伴,Nullmax在不同算力区间的芯片平台上实现了落地,走在业内商业化提速的前列。

宋新雨 | Nullmax纽劢创始人/COO
以下为演讲内容整理:
针对市场痛点Nullmax诞生
2017年,Nullmax将总部设立在上海张江,开启了自动驾驶的落地之路,之后不断在技术路线上更新迭代,延续以视觉为主、多传感融合感知的技术理念,针对中国市场和客户痛点,探索行车、泊车一体化的方案。此前我在美国经历了特斯拉Autopilot 1.0到2.0落地的全过程,相信在视觉为主的这条路线上不断突破和发展,可以推进自动驾驶领域的落地进程。
泊车功能在国外还较少,因为国外的停车位位置宽阔,所以相关需求几乎没有,而在中国却是刚需,并且场景程度也更为复杂。我们首先选择在中国落地自动驾驶,因为在行车场景上的挑战与门槛难度较高,同时泊车场景也在同步推进,包括行泊一体的方案。
Nullmax选择了深度学习为主的技术路线,并在现实中的工程化过程中,不断探索如何在资源和算力有限的情况下实现更高的性能。
云端车端两大场景助力行泊一体化发展
Nullmax方案涵盖云端和车端两块场景,云端以可视化和分析、数据筛选及标注,模型训练和评估为主;车端系统是从公司创立延续至今,以包括感知、规划、控制在内的上层应用软件为主。

图源:演讲嘉宾材料
行车这块我们有自己一套自研系统,在不断解决基础的ADAS功能的同时,打造更高阶的NOC自动领航功能。接下来,Nullmax将在中低算力平台上实现该功能的量产交付。同时,泊车场景也会在后续提升更多高级的功能。
我认为行泊一体大概经历了四个阶段的形态:一是行泊一体1.0形态,域控制器是分离式的;二是行泊一体2.0形态,行车、泊车集成式域控制器形成了一体化,但采用双SOC子系统;三是行泊一体3.0形态,采用行泊一体单SOC的系统,但传感器无法深度复用;四是行泊一体4.0形态,实现了传感器深度复用,行泊一体在单SOC上实现性价比更高的解决方案。这种方案的优势是在行车场景中,可以高度复用泊车场景传感器,带来性能的提升,这也是我们正在量产和实践的点。
我们产品分为两条线,一是上层应用算法,在车端实时运行、易于部署的感知、预测、规划一系列量产应用。二是单独视觉感知的产品线。Nullmax在与国内不同的tier1,包括主机厂有这方面的合作,已经在去年交付了周视感知模块。
中国的场景具有复杂性,在实践过程中,如果覆盖全部场景,就要满足不同的ODD范围,并且对场景的定义都要做大量的验证。比如对摄像头的要求、算法感知的要求,包括雨天、雾天相关的特殊场景等。所以现在大多数客户或者合作伙伴可能会选择大算力的芯片去实现,但我们可以在极具性价比的芯片上,率先在中国实现NOC自动领航功能的落地。
独有的BEV-AI技术架构,加速行泊一体应用落地
我们打造了一套平台化BEV-AI技术架构。一是不局限于英伟达、Orin的芯片,可以适配任何的芯片,包括国产芯片;二是面向所有主机厂,不管传感器的配置、芯片选型,包括不同的FOA,这套BEV-AI架构可以解决不同客户的定制化需求,还可以实现不同的配置;三是我们这套框架能实现超远距离的感知,并且还可以面向产品部署。就好像我们这套BEV-AI框架是一棵大树,针对不同的芯片产品,可以抽出来不同的解决方案。
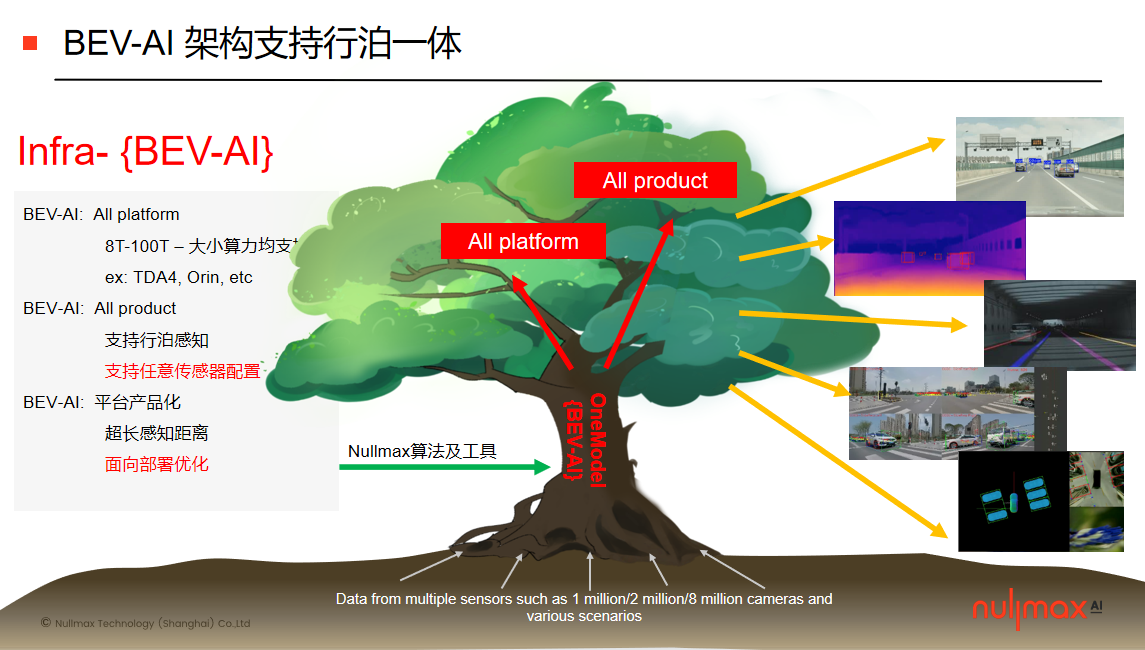
图源:演讲嘉宾材料
在BEV中,从一个摄像头到另一个摄像头需要很精确的感知技术,不同摄像头识别的车辆,能完整地定位成一辆,而不是出现多辆的显示,对于技术的要求较高。
Nullmax在BEV 3D检测的工作中,可以在复杂的城市十字路口感知大量的车流,在城镇的复杂十字路口完成感知任务,还可以识别大卡车、特种车辆等难点目标。
业界谈及BEV,大多数集中在感知领域,而我们在规控中也做了一些工作,比如把深度学习延伸到规控,学习人驾驶的行为习惯等。比如去年我们做到了全视觉稠密地图定位,是不依赖高精度地图的方案。接下来我们会部署这套不依赖高精度地图的BEV方案实现工程化落地。
数据确实是AI驱动技术落地的关键,对数据的依赖程度较高。我们不仅做好了自己的算法,也在云端形成了一套数据闭环体系,不管是主机厂还是tier1,共同打造云端的平台。如何高效利用和回收数据是关键点,更高效地帮助主机厂在量产时,实现更高的性能。
不仅如此,Nullmax自建并开源全球唯一特殊目标数据集,填补业界缺失数据空白,助力全球感知算法精进,解决业界缺少特殊目标数据的问题。通过大规模的自动化生成虚拟样本,可以有效且快速地满足数据的需求。
(以上内容来自于Nullmax纽劢创始人/COO宋新雨于2023年5月9-10日在捷途汽车主办,盖世汽车承办的2023捷途汽车电子架构与智能驾驶论坛上发表的《面向量产的行泊一体技术架构与产品矩阵》主题演讲。)